
Il piccolo progetto ha come scopo rilasciare un carico quando l’aquilone raggiunge una determinata altezza.
Per il progetto usiamo i seguenti componenti:
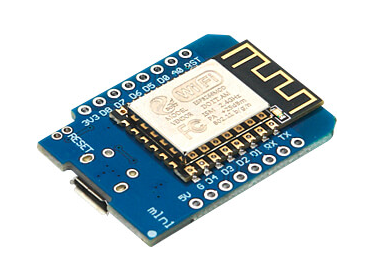
ESP8266, microcontrollore (https://amzn.to/3JkqdIS)
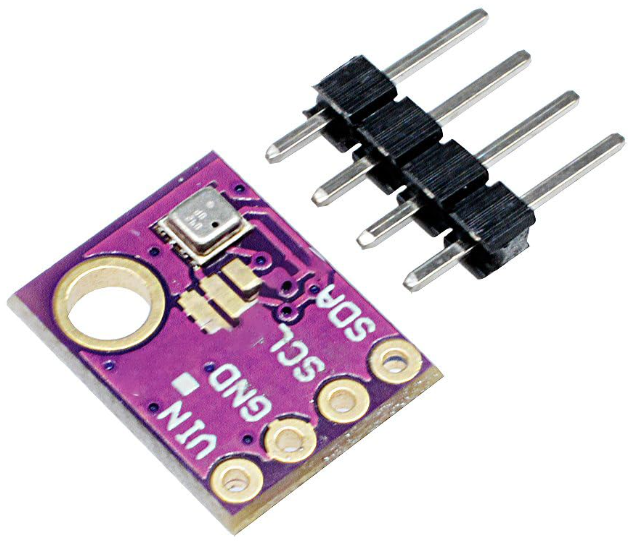
BME280 per la misura dell’altitudine (https://amzn.to/4mJPNW8)
servo motore per il rilascio di carichi (https://amzn.to/3V3iBgw)

Step UP per l’alimentazione (https://amzn.to/3HD4LOT)

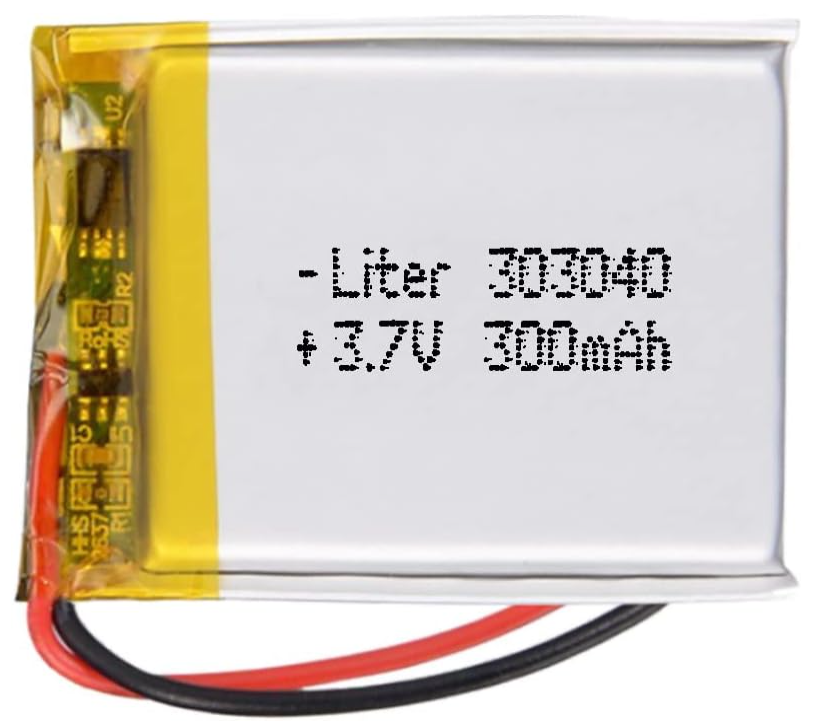
Batteria (https://amzn.to/4oD9hNS)
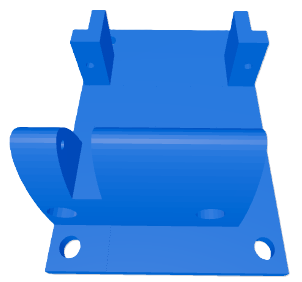
3D Sistema di sgancio per servo. (https://www.thingiverse.com/thing:4275454)
Il progetto lo puoi trovare su GitHub a questo link https://github.com/hellosarobotics/KitePayloadRelease
Avvio del sistema
- Accensione ESP8266
- Si inizializza la connessione Wi-Fi in modalità Access Point (
KiteRelease). - Si inizializza il sensore BME280 (se presente).
- Si imposta il servomotore in posizione “chiuso”.
- Si legge la pressione di riferimento salvata nella memoria EEPROM.
- Si prende come riferimento l’altitudine attuale (altitudine relativa = 0).
- Si inizializza la connessione Wi-Fi in modalità Access Point (
Funzionamento principale (loop)
- Lettura dati sensore
- Temperatura, umidità, pressione atmosferica.
- Calcolo dell’altitudine assoluta e relativa.
- Aggiornamento dell’altitudine massima raggiunta.
- Controllo automatico di sgancio
- Se è impostata una quota di sgancio (>0) e il carico non è stato ancora rilasciato:
- Se l’altitudine relativa è maggiore o uguale alla quota di sgancio:
→ Comando di sgancio (servo in posizione di rilascio → poi ritorna chiuso).
→ StatoCarico rilasciato = true.
- Se l’altitudine relativa è maggiore o uguale alla quota di sgancio:
- Se è impostata una quota di sgancio (>0) e il carico non è stato ancora rilasciato:
- Gestione webserver
- L’ESP8266 risponde alle pagine richieste dal browser all’indirizzo 192.168.4.1
- Pagina principale: mostra i dati del sensore e lo stato del rilascio (verde da rilasciare / rosso rilasciato).
- Endpoint dati: restituisce i valori in formato JSON per aggiornare dinamicamente la pagina.
- Form pressione livello mare: salva un nuovo valore di riferimento in EEPROM.
- Form quota di sgancio: imposta la quota per il rilascio automatico e resetta lo stato.
- Pulsante “RILASCIA”: sgancio manuale immediato.
- Pulsante “Reset Altitudine”: azzera l’altitudine relativa, l’altitudine massima e lo stato di rilascio.
- L’ESP8266 risponde alle pagine richieste dal browser all’indirizzo 192.168.4.1
Cosa vede l’utente sulla pagina
- Temperatura, umidità, pressione, altitudine assoluta e relativa, altitudine massima.
- Un indicatore colorato:
- Verde = carico non ancora rilasciato.
- Rosso = carico già rilasciato.
- Pulsanti e form per modificare la pressione di riferimento, la quota di sgancio, azzerare l’altitudine e rilasciare manualmente il carico.